FARM LAB
Field Automation, Robotics, & Machinery Lab
Department of Biological and Agricultural Engineering, North Carolina State University
Welcome to the Field Automation, Robotics, & Machinery (FARM) Lab, directed by Dr. Kitae Kim at North Carolina State University!
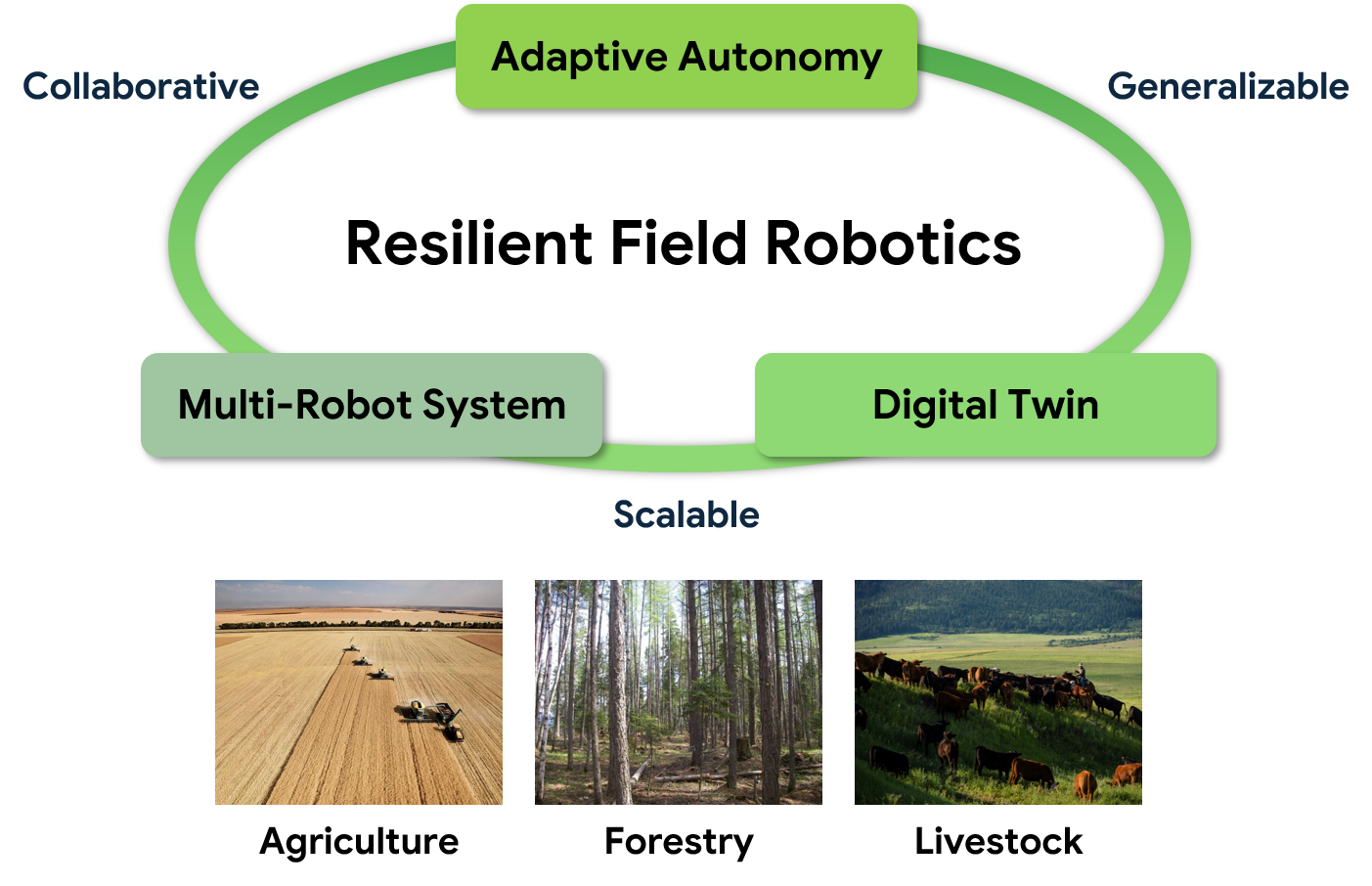
The ultimate mission of the FARM Lab is to design intelligent robotic systems that mitigate critical global challenges, such as extreme weather volatility, labor shortages, and severe resource constraints. To achieve this mission, our research focuses on developing Generalizable, Collaborative, and Scalable Robot Autonomy in challenging and unstructured field environments, with applications in, but not limited to, agriculture, forestry, and livestock. Our lab designs and deploys diverse autonomous intelligent systems across heterogeneous platforms, including wheeled ground vehicles, legged robots, aerial drones, and humanoid robots.
If you want to learn more about the research vision of our lab, please click here.
Recent news
| May 27, 2026 | 🚀 We are thrilled to announce the official launch of the FARM Lab at NC State University! |
|---|---|
| May 16, 2026 | 🎉 I am honored to join the Department of Biological and Agricultural Engineering at NC State as a tenure-track assistant professor this Fall! |
Selected publications
- RA-L
 P-AgNav: Range View-Based Autonomous Navigation System for CornfieldsIEEE Robotics and Automation Letters, 2025
P-AgNav: Range View-Based Autonomous Navigation System for CornfieldsIEEE Robotics and Automation Letters, 2025 - RA-L
 P-AgSLAM: In-Row and Under-Canopy SLAM for Agricultural Monitoring in CornfieldsIEEE Robotics and Automation Letters, 2024
P-AgSLAM: In-Row and Under-Canopy SLAM for Agricultural Monitoring in CornfieldsIEEE Robotics and Automation Letters, 2024 - RA-L
 P-AgBot: In-Row & Under-Canopy Agricultural Robot for Monitoring and Physical SamplingIEEE Robotics and Automation Letters, 2022
P-AgBot: In-Row & Under-Canopy Agricultural Robot for Monitoring and Physical SamplingIEEE Robotics and Automation Letters, 2022 - RA-L
 HD Map Update for Autonomous Driving With Crowdsourced DataIEEE Robotics and Automation Letters, 2021
HD Map Update for Autonomous Driving With Crowdsourced DataIEEE Robotics and Automation Letters, 2021